ACM2012 「はやぶさ」と「はやぶさ2」の展示コーナー紹介
レーザ高度計(LIDAR)による科学成果


阿部先生はね、はやぶさ君が小惑星イトカワを探査していたときはLIDARのチームの一員でした。現在は小惑星、彗星などの小天体や、流星の研究をなさっているのよ。宇宙研でご一緒した当時は、獅子座流星群や、宇宙塵のお話をたくさん伺ったわ。今回は、「レーザ高度計(LIDAR)による科学成果」と「はやぶさ探査機とカプセルの地球大気突入発光スペクトル」のポスターを担当してくださっているのよ。LIDARのポスターには、O.S.Barnouinさん、LIDAR teamの皆さんもご協力くださってます。
LIDARは光の矢をイトカワ表面に当てては、その反射光を観測して、イトカワ表面までの距離を計測する装置ですよ。LIght Detection And Rangingという英語を省略したものです。文字通りにいうと、「光(で)探知と測距(する装置)」というところでしょうか。50kmも離れた場所からの散乱光を計測するために、受信部は望遠鏡になってますよ。
AMICA(小惑星多色分光カメラ)で撮影した画像と合わせて小惑星の形を精密に求めたり、イトカワの重力を計測したりいたしました。もちろん、タッチダウンの時には大活躍でしたよ。(ばあや)
阿部先生が現在所属している、国立中央大学天文研究所の英語のトップページはこちらです。
 http://www.astro.ncu.edu.tw/index_e.shtml
http://www.astro.ncu.edu.tw/index_e.shtml
せっかくですので、教員紹介のページもご紹介しましょうね。
http://www.astro.ncu.edu.tw/index_e.shtml?p=iancu/people/faculty/abe_s.html
このページで阿部先生がもってらっしゃるのは、かりんとうではなくて、小惑星の模型ですよ。
工学的な側面は水野先生が2005年に書かれた物をどうぞ。
はやぶさ近況 距離を測る光の矢
http://www.isas.jaxa.jp/ISASnews/No.298/isas-hayabusa.html
理学的な側面は阿部先生が2006年に書かれたものをどうぞ。
はやぶさ探査機による小惑星イトカワの質量と局所地形の計測(サイエンス論文・プレスキット)
http://nemesis.astro.ncu.edu.tw/~avell/KOBE/science_press/
LIDAR観測機器外観

手前に見えている筒を小惑星イトカワに向けて、跳ね返ってくる光を計測します。やや右上の細い方の筒が送信機、太い方の筒が受信機ですよ。送信した光のうち、イトカワ表面に当たってから受信機まで戻ってくる分はごくわずかですので、受信機はカセグレンという種類の望遠鏡ですよ。左側についている板が、LIDAR専用の放熱板ですね。写真奥側を、はやぶさ君の底の部分に取り付けてましたよ。
諸元
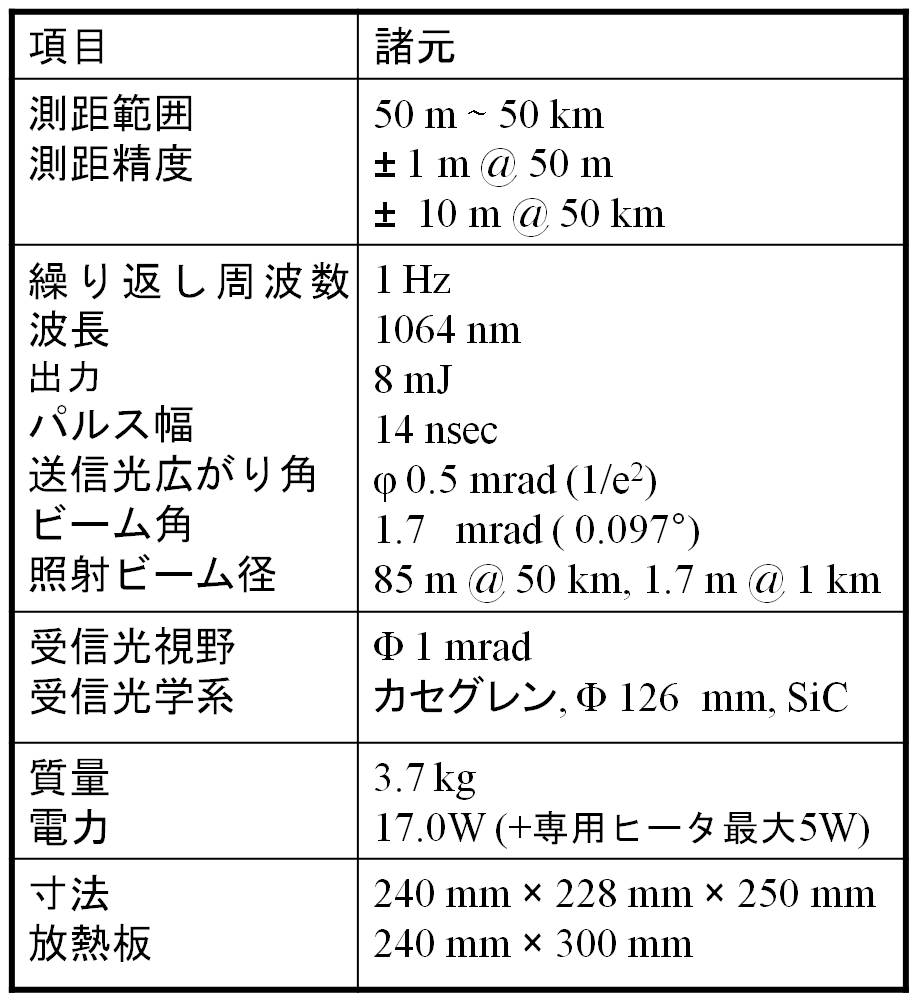
光のパルスを送受信する周期は一秒間に一度。50mから50kmの距離が測れるそうよ。測距精度は50kmのところで10m、50mまで近づくと1mということですから、ずいぶん長い物差しで、さらに精密に計測できることがわかりますね。
例えば、みなさんの筆箱に入っている小さな定規は、長さ10cmくらいで1mmごとに目盛りが入っているものが一般的でしょうか。これだと、10cmのものの長さを1mm単位で計測できるということです。1/100の細かさですね。
LIDARの場合は、距離が近い50mの時こそ、1/50の細かさまでしか計測できませんが、実はこの定規が1000倍の長さまで伸びて、その時には1/5000の細かさで計測できるのですから、とっても便利な優れモノなんですよ。
宇宙機に乗せるためには、重量制限や消費電力制限が厳しいですから、LIDAR開発チームの皆さんも頑張ったそうですよ。
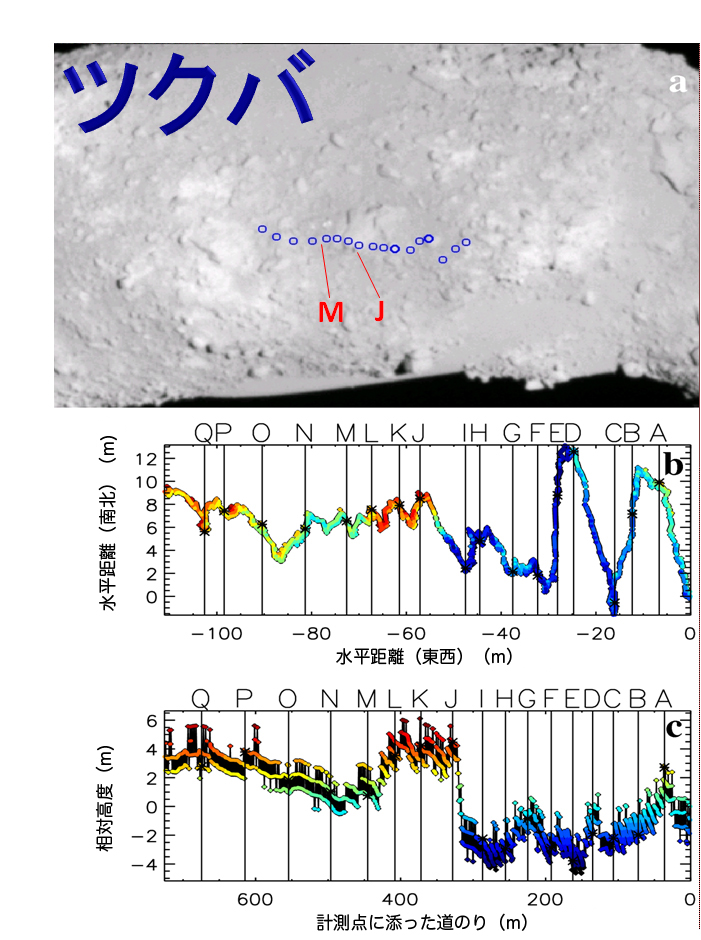
ツクバ
この地域はね、2006年当時は「ツクバ」と名付けられましたが、2009年に国際天文学連合(IAU)に承認された地名では「オオスミ」と呼ばれています。天体の名前や地名をつけるのには、いろいろな決まりごとがあるみたいですね。
「はやぶさ」によるイトカワの科学観測成果、科学雑誌「サイエンス」が特集!(2006年 ISASトピックス)
小惑星イトカワの地名、新たに14個をIAUが承認(2009年 ISASトピックス)
小惑星の写真の上の青い点がLIDARの計測点です。背景はちょっと拡大されていてわかりずらいのですが、うつぶせにしたラッコの右わき腹あたりです。ここは、ラフ地域と言って、地面のでこぼこが激しい場所だそうです。アルファベットは右から順に観測点を示してますよ。
真ん中のグラフは、計測点の東西南北への移動距離ですね。原因は、はやぶさ君の向きのふらつきです。はやぶさ君とイトカワ表面との距離が長いから、ごくわずかなふらつきでも大きく見えてしまうのよ。教室の後ろの壁にレーザーポインタを当てて動かしてみるとよくわかるわ。
下のグラフは、横軸が隣の観測点までの距離を、縦軸が標高を表しています。標高の誤差はこのグラフでは1.5m程度ですって。地球と小惑星イトカワとの距離が、近い時でも370万km、遠い時には3億kmもあることを考えると、本当にすごい精度だわ。国土地理院発行の1/25000の日本地図の等高線が2.5m間隔なのと比べても、遜色ない値よ。
Abe et al.(2006)によると、DとGにはLIDARのスポット径と同じくらいの大きさの石があると考えられているそうよ。JからMにかけての盛り上がりに関しては、次のタネガシマをご覧くださいね。
そうそう、Abe et al. (2006)というのは、阿部さんと仲間たちが、2006年に書いた論文という意味ですからね。3人以上で書いた論文だと、メインで書かれた方以外はet al.(その他という意味)で省略されてしまうのですよ。
タネガシマ
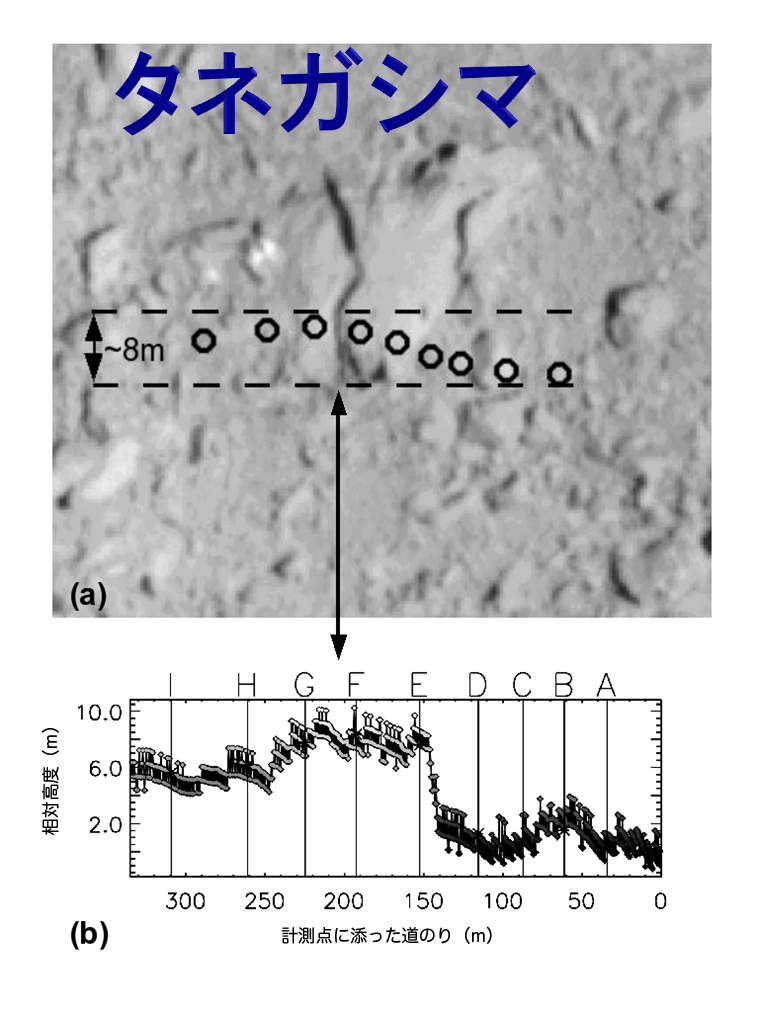
タネガシマはツクバ地域の中にある、ボルダー(岩)です。タネガシマの地形をより拡大したものを、Barnouin-Jha et al. (2008)からどうぞ。ボルダーの高さは3-4 mだそうですよ。右側の方が少し深くなっているみたいですね。
イトカワにはこのようなボルダーがたくさんあります。
表面の粗さ 1

イトカワの表面がどれくらいでこぼこなのかを測って、平均直径が20km程度の小惑星エロスにあるプシュケという名前のクレーター付近のでこぼこさと比べましたよ。プシュケはエロス最大のクレータで、直径は5kmくらいだそうです。
横軸は基線の長さを、縦軸にはその基線の長さの間でどの程度の高さのばらつきがあったかをグラフにしています。簡単にいえば、基線長の短いところは局所的な凸凹を、長くなるほど大きな地域での凸凹を表しています。縦軸では、上にいくほどでこぼこが激しく、下にいくほど、なめらかということを表しています。
こちらのグラフは、エロスのプシュケクレーターのでこぼこさを計測したChengさんたちの論文に、イトカワのデータを重ねたものですね。上から、高地領域(周りよりやや高くてごつごつしている所)、ツクバ領域(クレーター)、ミューゼスの海(正式名称はミューゼスシー領域、なめらかな場所)のでこぼこさを表しているわ。イトカワの高地や、ツクバクレーターのあたりは表面粗さ2.2m程度で、エロスのプシュケクレーター付近と同じくらいにでこぼこしてますね。このことから、プシュケークレーターの破片堆積物もイトカワのボルダーも、同じようなメカニズムで作られたかもしれないって言われているのよ。エロスとイトカワの直径は約50倍も違うのにね。
一方で、ごつごつした高地領域と比べると、ミューゼスの海は表面粗さ0.6mですから、ずいぶんなめらかですね。
ちなみに、地球の表面に凸凹を作る活動というと、火成活動、風化などがあります。地球の様に中身の熱い天体では、火山活動やプレートの移動、造山活動などの火成活動で表面のデコボコが作られます。水や砂嵐などで大地が削られる浸食も地面の形を変えていきますね。でも、イトカワのような小天体の中身は熱くないので火成活動もありませんし、水も大気もないので、それらによる浸食もありません。
そんな冷え切って、かつ大気を持たない小天体の表面地形を変化させているのが衝突現象なのです。隕石が落ちて来てクレーターができたり、表面の石が砕かれたり、場合によっては、天体そのものが壊されるほどの激しい衝突もあります。表面の石の大きさや形、デコボコ、並び方から、その天体の表面がどんな歴史を経てきたかを調べる研究者もたくさんいるのですよ。
表面の粗さ 2

上と同じグラフを、イトカワのデータだけで書いたものですね。横軸の長さの規模が100mまでしかないのは、イトカワが小さいからですよ。ラッコの右下腹や右後頭部の高地や、稜線を横切る線上や、クレーター内部でのデコボコが大きいのに比べて、ミューゼスの海はとてもなめらかであることがわかります。そうそう、コマバはラッコの左下腹あたりのクレーターですよ。
観測点数
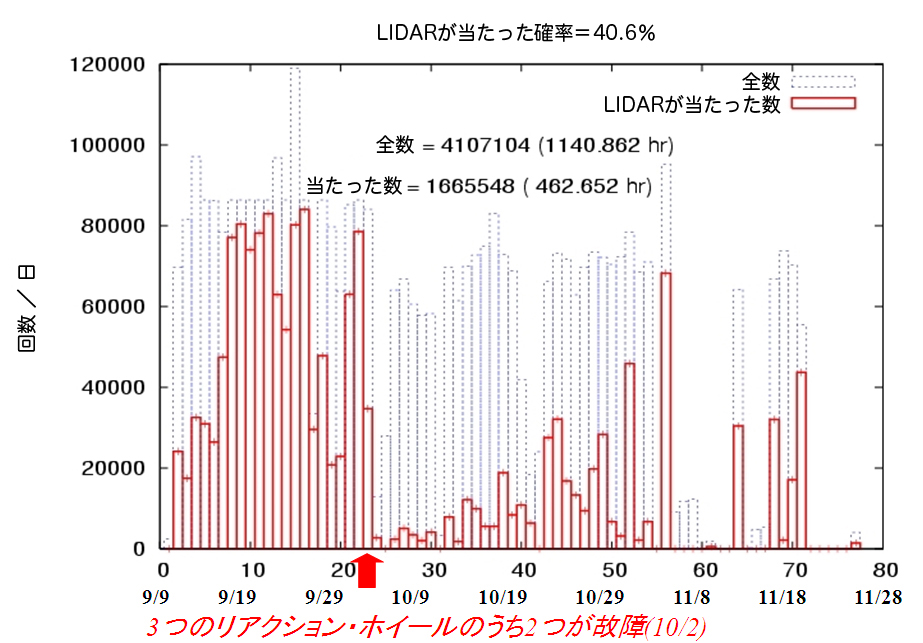
ミッション期間中の観測で、LIDARの発信した光がイトカワに当たった回数だそうです。光を出す周期は一秒間に一回ですので、一日にすると相当の回数になりますね。リアクションホイールが2台あるうちはかなり良い確率でデータがとれていたようですが、3台のリアクションホイールのうち2台が壊れてしまってからは、「はやぶさ」本体の細かい向きが調整しづらくて、どうしてもイトカワに当たる光のパルスの数が減ってしまったようですね。それにしてもイトカワに当たった分だけで167万回とは、大したものですね。
探査機の動き

はやぶさがイトカワに近づいていくときの、はやぶさの位置を、イトカワを中心として書いてみましたよ。中心にある青い落花生がイトカワです。
本当は、はやぶさ君は自転するイトカワに寄り添って飛んでいますが、この絵ではイトカワの自転を止めた座標系ではやぶさ君の位置を表しています。
座標系の話はちょっと難しいですけど、そうですねぇ。例えば、あなたがメリーゴーランドに乗っているとしましょう。ここで、あなたから見たベンチに座っているお友達の位置を考えてみましょう。本当は、あなたがメリーゴーランドの回る床の上にいるのですが、自分が廻っていることを忘れてしまえば、ベンチにいるお友達は、あなたの周りをまわっているように見えますよね。さらに、遠くからメリーゴーランドに近づいてくる人を考えてみましょう。あなたを中心に考えると、その人はきっと、この図の赤い点のように動いてきますよ。
こうやってイトカワに近づきながら、LIDARは はやぶさと地面との距離を測り続けたのですね。
稜線
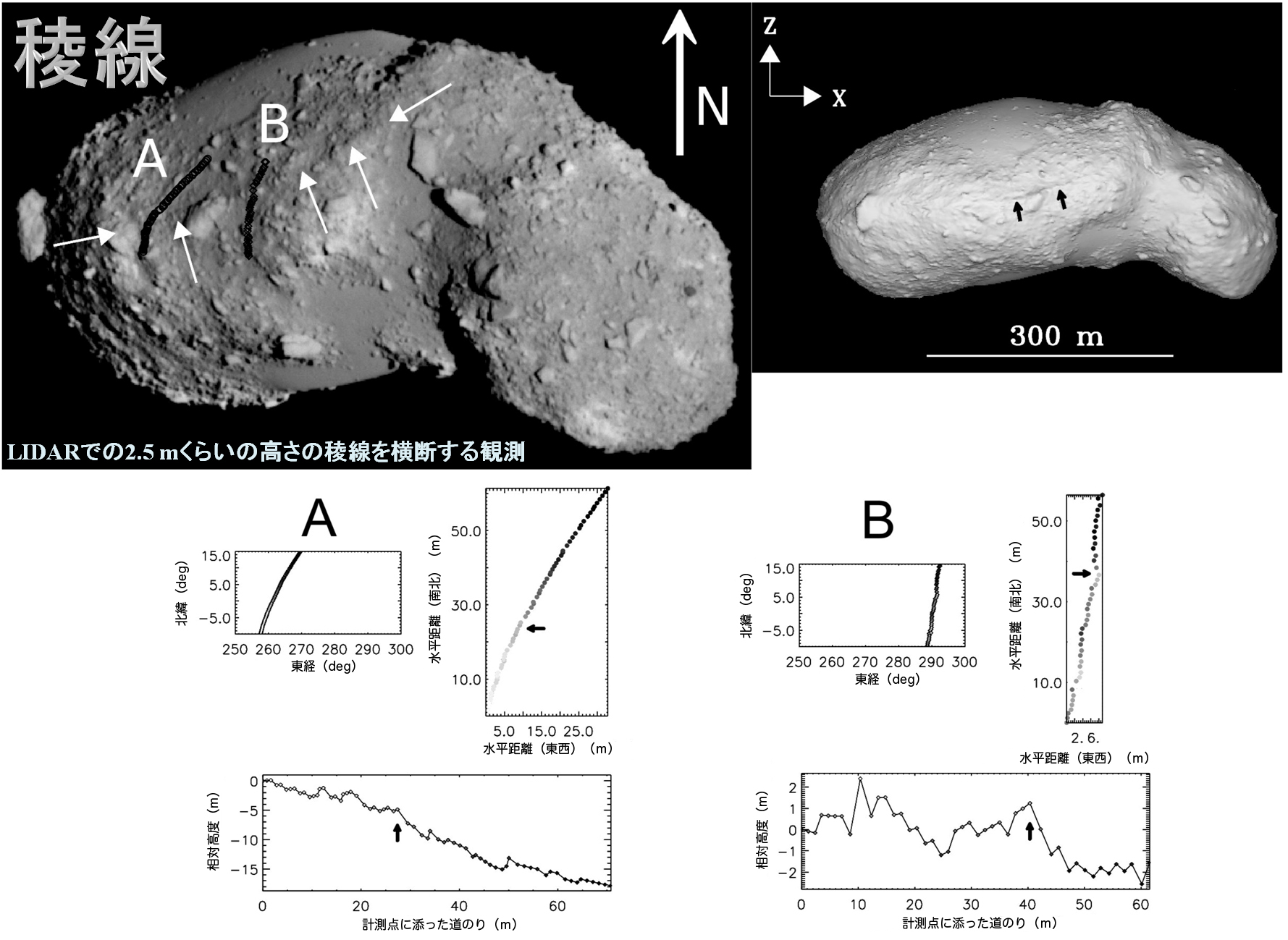
小惑星イトカワの角張った部分の形を、LIDARを使って観測した図です。AとBの2本の線に沿って観測を行ったそうですが、両方とも稜線のところに盛り上がりが見られたそうですよ。こういう細かいでこぼこの認識を、AMICA一台だけでやろうとするのは結構大変なのです。人間の場合には、左右の眼の見え方の違いを利用して距離を測ったり、焦点距離の違いで距離を感じたりいたします。後者はカメラの種類によっては一台でもやってできないことはないのですが、細かい計測を行うのはやっぱり難しいようです。そこで、LIDARが活躍いたしました。
それから、距離を知る方法の3つめ、大きさの分かっているものを見ながら、その大きさの変化で距離を知る。という方法は、はやぶさ君の運用でも使われていましたよ。
ミューゼスシー領域
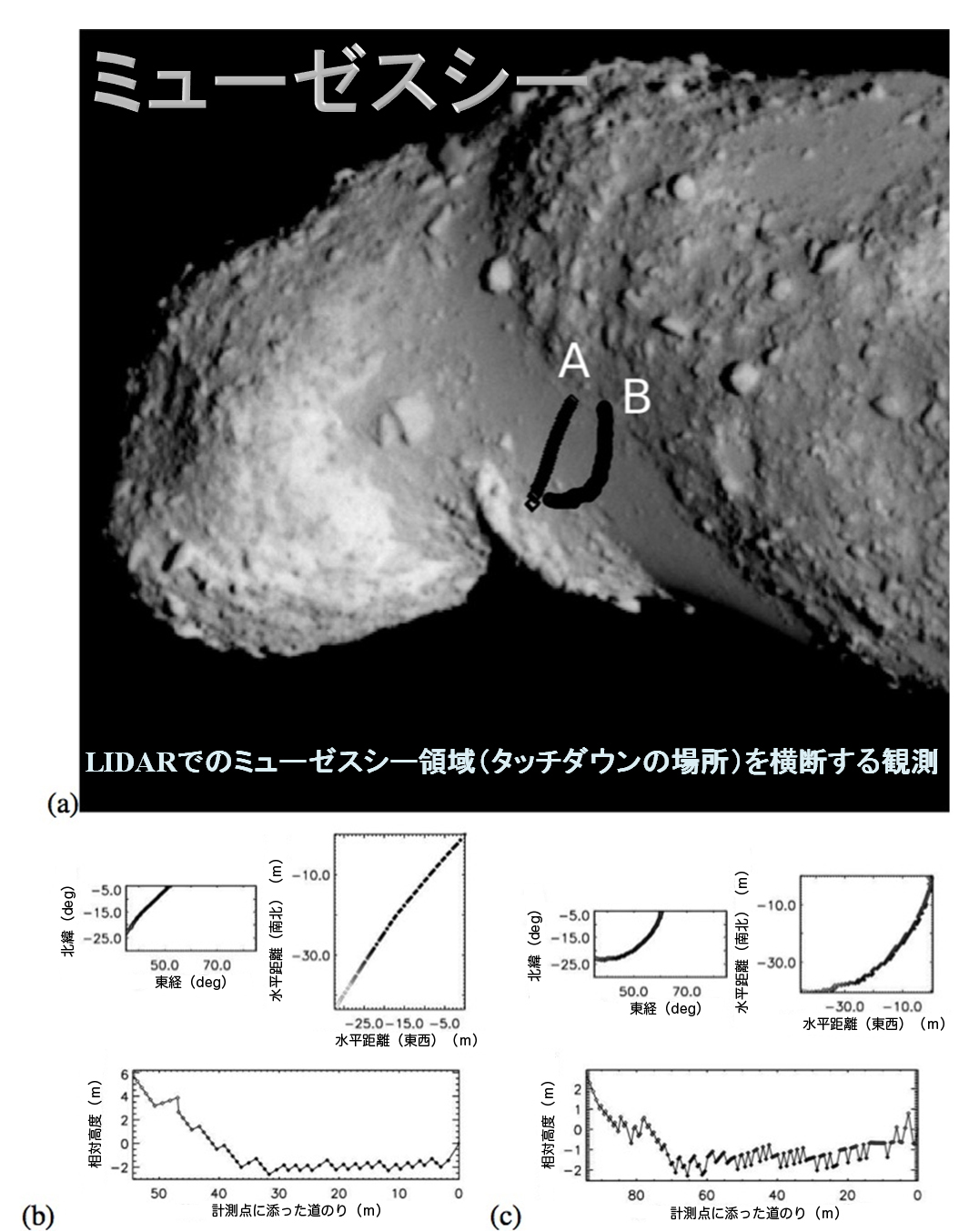
小惑星イトカワは、小さいけれど、いろいろな顔を持っています。中でも、ミューゼスシーは細かい石がたくさんあって、平らな部分ですよ。LIDARを使った観測でも、『平らさ』が計測できました。表面粗さが0.6mですって。
重力 1
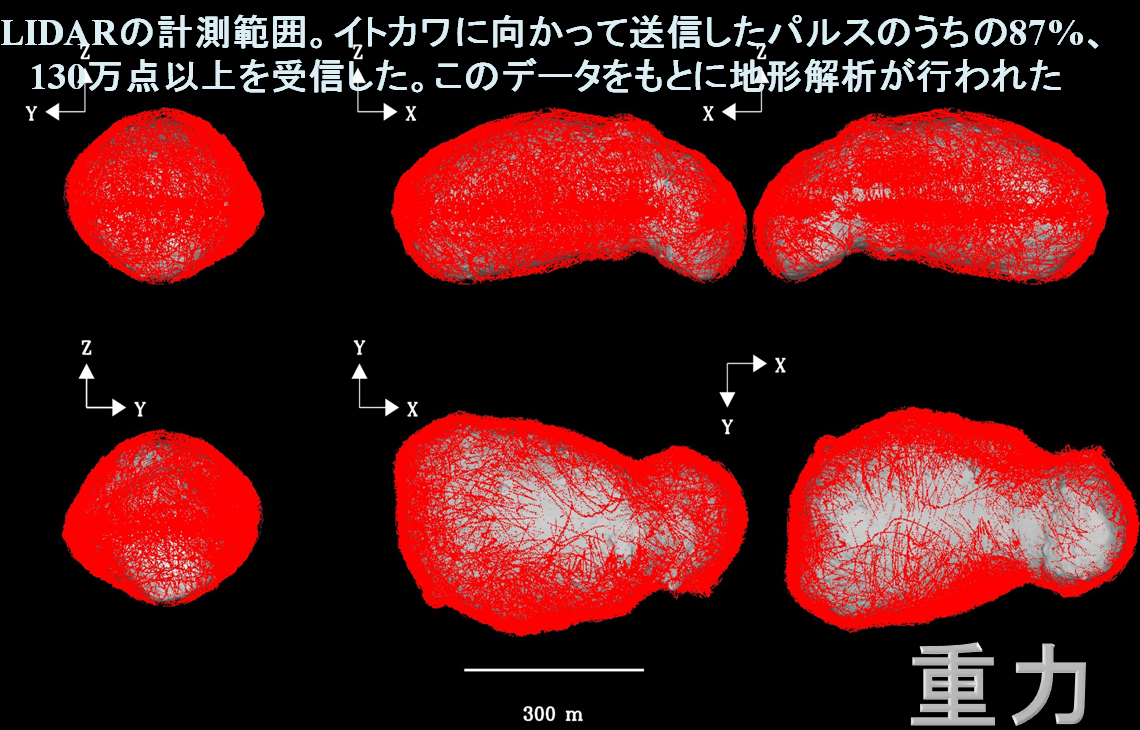
重力を計測するためには、まず、イトカワの形を見極め、それから、エンジンを止めてイトカワからの引力を感じ、イトカワに引かれながら、イトカワとの距離を測り続けることが必要です。イトカワとはやぶさとの距離を計測するのに役に立ったのが、このLIDARと地球からの電波での距離計測です。
「LIDARの計測範囲。イトカワに向かって送信したパルスのうちの87%、130万点以上を受信したデータをもとに地形解析に使われた」そうですよ。
赤い点がLIDARで計測した点ですね。イトカワの赤道部分を中心にびっしりと赤い点に覆われています。ただ、はやぶさ君は自転するイトカワに寄り添って飛びながら横から眺める立場でしたので、極地域(中下と右下の2個)の観測は少なめですね。とはいえ、3台のリアクションホイールうち2台が壊れたはやぶさ君が、よくここまで高緯度の観測をやったものです。高緯度地方をLIDARやNIRSで観測するためには、はやぶさ君本体も傾かなくてはいけません。傾けば傾くほど、太陽電池の発電量も減ってしまいますし、地球との通信回線も細くなります。慎重な運用が繰り広げられていたそうですよ。
重力 2
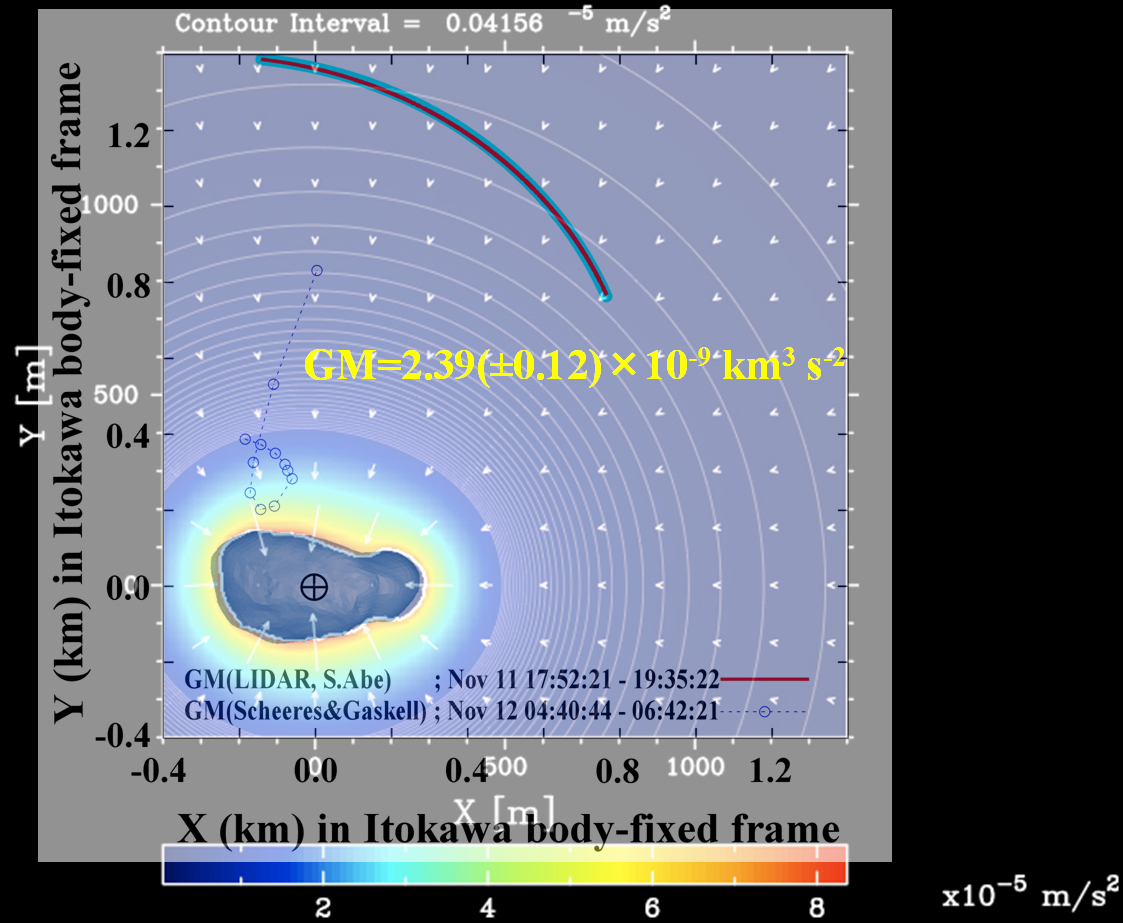
これは、はやぶさ君がイトカワに自由落下していたときの軌道ね。この図もイトカワの自転を止めた座標系で描かれています。実際には、はやぶさ君は自転するイトカワに向かって、まっすぐ引っ張られていきましたよ。
はやぶさ君がイトカワを探査しているとき、はやぶさ君には次の4つの力が加わってました。(1)太陽の重力、(2)はやぶさ君のスラスタの力、(3)太陽の光による圧力(光圧)、そして、(4)イトカワからの重力です。
(1)の太陽の重力は大きすぎるし、ずっと感じているから仕方ないわね。値が分かっているから差し引きしましょう。(2)はやぶさ君のスラスタ。これはいろいろと調節して、スラスタを吹かないで済む時間を作りましょう。そして(4)のイトカワからの重力と比べると無視できないのが(3)の太陽光圧です。ゲートポジションと言って、イトカワからの距離が20km程度の時には、はやぶさ君がイトカワ方面に引っ張られたと感じる力のうち、95%が太陽光圧に押された力だったんですって。
重力というものは、近づけば近づくほど強く感じるものなの。だから、はやぶさ君がイトカワに近づいて、スラスタを吹かずに、自由落下に近い時に、その軌道をLIDARと航行画像(ONC)を使って求めて、地球上の重力の1万分の1という小さなイトカワの重力を計測することができたんですって。ちなみに、Gは重力定数、Mはイトカワの質量です。
イトカワの質量推定に関しては吉川先生に語っていただきましょうか。
微小小惑星の質量を求める(宇宙科学の最前線,2006年)
アライメント
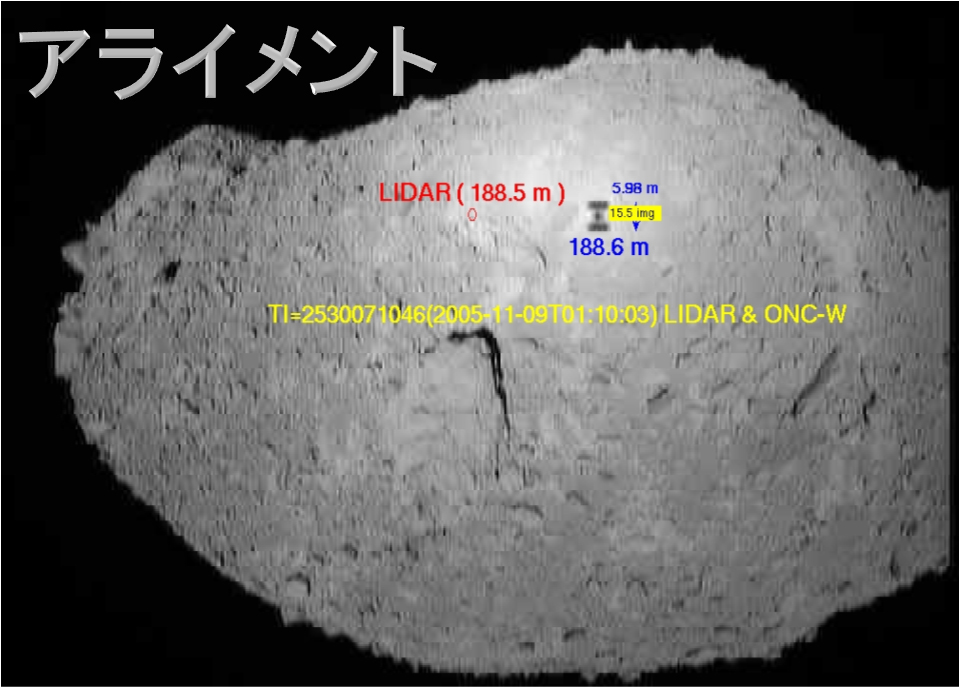
はやぶさ君のハイゲインアンテナのついている面の裏の面には、さまざまな観測機器がついているのですよ。LIDARもその一つです。この図は、AMICA(小惑星多色分光カメラ。航法誘導の仕事をしているときにはONC-Wとも呼ばれる)の写真にLIDARの観測地点(赤○)を合わせたものです。2005年11月9日のものですから、航法誘導試験でイトカワに188.5mまで近づいた時のものですね。はやぶさ君の影がちょうど向きと大きさの目安になってますよ。
アライメントとは、この場合、『向き』を合わせることです。打ち上げの振動、そして宇宙での長旅を経ても、観測装置の向きがきっちり合っているかを確かめるのはとても重要なことなのよ。例えば、八百屋さんに、魚があった。と思ったら、実は観測装置の一つの向きがずれて、隣の魚屋を見ていただけ。なんて結果にはなりたくないですからね。
LIDARとNIRSの向きを合わせる

こちらは、LIDARとNIRS(近赤外分光器)の向きの確認です。LIDARの光がイトカワに当たって跳ね返ってきたものをNIRSで観測いたしましたよ。LIDARは1064nmの波長の光だけを出します。NIRSは大体850から2100nmの波長の光を検出することができます。太陽の光にはさまざまな波長の光が含まれておりますので、LIDARで発信しながらNIRSで観測しますと、LIDARが出した光を含む波長帯域だけが明るく見えます。
このグラフは、横軸に光の波長と、NIRSのチャンネルを、縦軸にそれぞれのチャンネルの出力電圧を書いてあります。NIRSとLIDARは、共に視野が非常に狭くて、前の図の小さな楕円ぐらいしかないの。打ち上げ直前までかかって、両者の視野を精密に合わせましたが、ロケットの打ち上げ時の振動で僅かにずれてしまう可能性もありました。ですから、LIDARがどこを向いているかをNIRSを使って確認する必要があったのです。NIRSは小惑星に到着するまでの間に、AMICAと共同で恒星の観測をおこない「どこ」を狙っているのかを突き止めていたので、LIDARの光が予想される強度でNIRSが受けることができれば、LIDARはNIRSと同じ場所を見ていることが確認できますね。
青い線は打ち上げ前の、赤い線はイトカワ上空での実験結果です。LIDARは近くに物体がないと試せませんから、地球から打ち上げた後は、イトカワに近づくまで、担当の皆さんは確認作業ができなくてドキドキなさっていたでしょうね。
そうそう、視野が狭いというのはそれだけ分解能が高いということでもあるのよ。入射した光を全部まとめて分光するタイプのNIRSは視野が狭い方が、より狭い場所ごとのデータがとれますからね。それに、LIDARは、はやぶさ君の真下の高さを測る目的の装置ですから、それぞれ視野が狭い方が目的に合っているわ。
打ち上げ前のLIDARとNIRSのアライメント調整の様子はこちらをどうぞ
報われたアライメントの苦労(ISASニュースNo.363[PDFファイル]、P6下)
傾斜 1

イトカワの傾斜を色で表わすとこうなるそうよ。イトカワの形を詳しく調べ、重力も求めると表面の傾斜がわかります。イトカワ表面の傾斜は重力に沿って平らな部分とずいぶん傾いた部分があるようですね。これをもとにした議論は、宮本先生のご専門ですから、説明は宮本先生のポスターでいたしましょうね。
傾斜 2

色のついたイトカワと同じ向きでのAMICAの写真です。確かに見た目ですべすべなところと一致している領域もありますが、見た目によらない場所もありますね。この図は、「はやぶさ」科学データアーカイブにもあるわよ。データ、AMICAと進んで、日付と番号を頼りに探してみてくださいね。ちなみに9/29はGate Position、9/30はHome Positionです。
「はやぶさ」科学データアーカイブ

